Line flowing robot
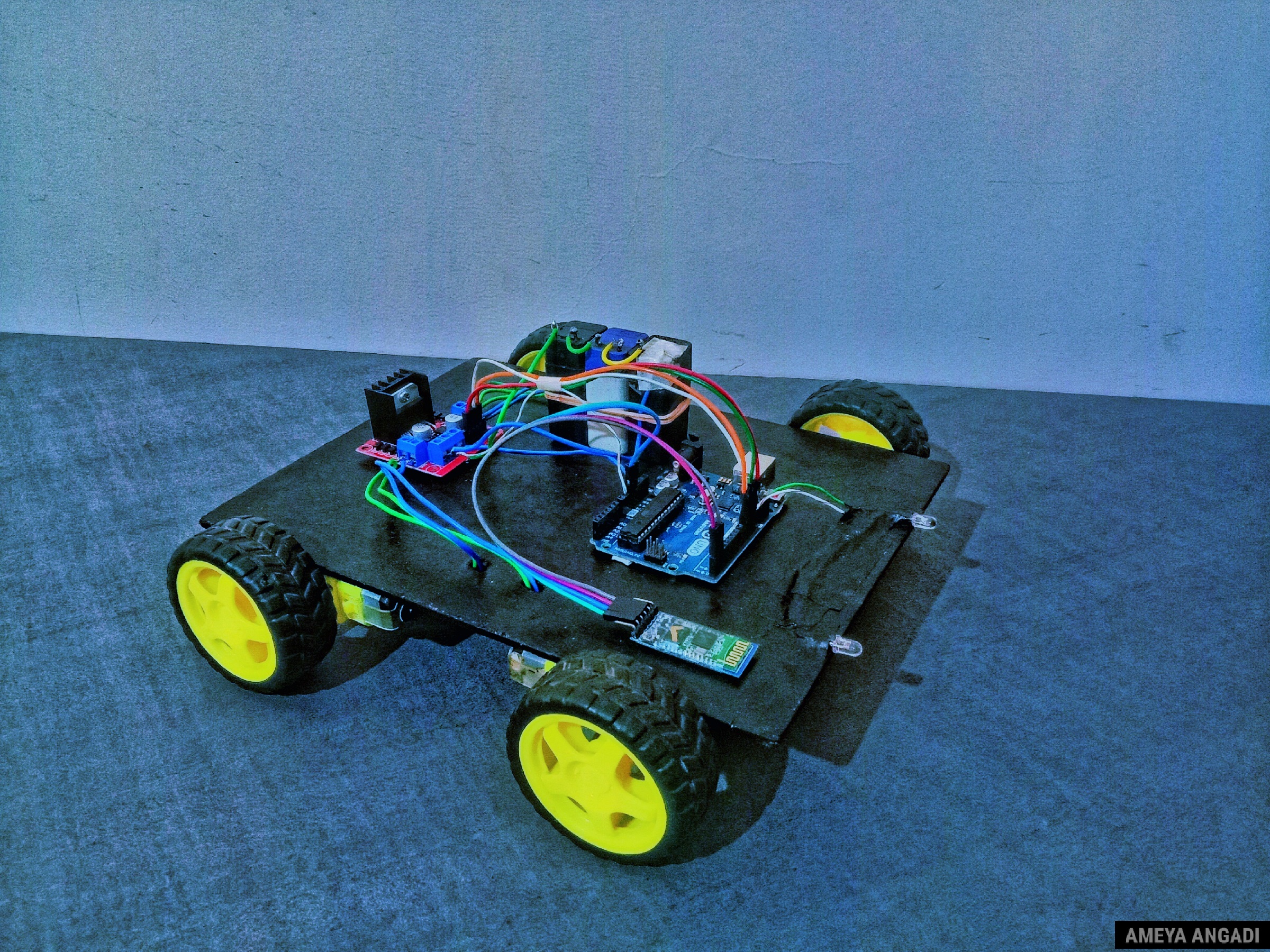
The Line Following Robot is an autonomous mobile robot designed to follow a predefined line or path using sensors and motor controls. This project uses an Arduino Uno microcontroller, an array of sensors, and motorized wheels to create a robot that can navigate along a line, making it suitable for various applications in industrial automation, transport systems, and educational robotics.
Components:
1. Arduino Uno: Serves as the brain of the robot, processing input from the infrared sensors to control the movement of the wheels. It also interacts with the ultrasonic sensor to detect obstacles, if any, along the path.
2. Ultrasonic Sensor: Adds obstacle detection capabilities to the robot, allowing it to avoid collisions by sensing objects in its path and adjusting its movement if necessary.
3. PCB (Printed Circuit Board): Organizes and secures all electrical connections between the components, making the robot’s wiring more reliable and compact.
4. DC Motors: Two DC motors control the robot's wheels, providing the movement required to follow the line. These motors are connected to the motor driver, which provides the necessary power and control signals from the Arduino.
5. Wheel Tires: Attached to the DC motors, the tires provide traction and allow the robot to move smoothly along the line.
6. Motor Driver: The motor driver receives signals from the Arduino and controls the DC motors' speed and direction, allowing the robot to navigate turns along the line.
7. Infrared (IR) Sensors: These sensors are critical for line following, as they detect the contrast between the line and the surrounding surface (usually a black line on a white surface). The sensors send signals to the Arduino, which then makes adjustments to keep the robot on track.
Working:
1. Line Detection: The IR sensors continuously scan the surface beneath the robot. When they detect the black line, they send signals to the Arduino, which then calculates the required adjustments to keep the robot on the line.
2. Movement Control: Based on the IR sensor input, the Arduino sends commands to the motor driver, which adjusts the speed and direction of each motor. This allows the robot to make small turns and follow the line accurately, even around curves.
3. Obstacle Detection: The ultrasonic sensor detects any obstacles in the robot’s path. If an obstacle is detected, the robot can pause or change its route as per programmed instructions.
Benefits:
- Autonomous Navigation: The robot can follow a designated path without human intervention, making it ideal for repetitive tasks in automation and transport.
- Real-Time Line Tracking: With IR sensors, the robot can quickly adjust its position to stay on track, even around curves or complex paths.
- Collision Avoidance: The ultrasonic sensor enables obstacle detection, enhancing the robot’s capability to operate safely in dynamic environments.
Applications:
- Industrial Automation: This robot can be used to transport items along a fixed path in warehouses or manufacturing facilities.
- Educational Robotics: A great tool for teaching students about sensors, motor control, and basic programming.
- Automated Transport: Useful in small-scale applications for guided transport, such as in libraries or hospitals where objects need to be moved along a specific route.
Components Required
- arduino uno
- ultrasonic
- pcb
- dc motors
- wheel trye
- motor driver
- infrared sensor
For More Information
+250783159293